A DIY quadcopter drone
When I was a university student, drones were starting to get popular so I decided to make my own. I made two attempt at the idea: The first attempt involved designing the most of drone from scratch, its mechanical design as well as its electronics, including the remote controller. After that attempt proved less than satisfactory, I designed a new version of the drone, this time with off the shelf electronics.
V1: Fully DIY
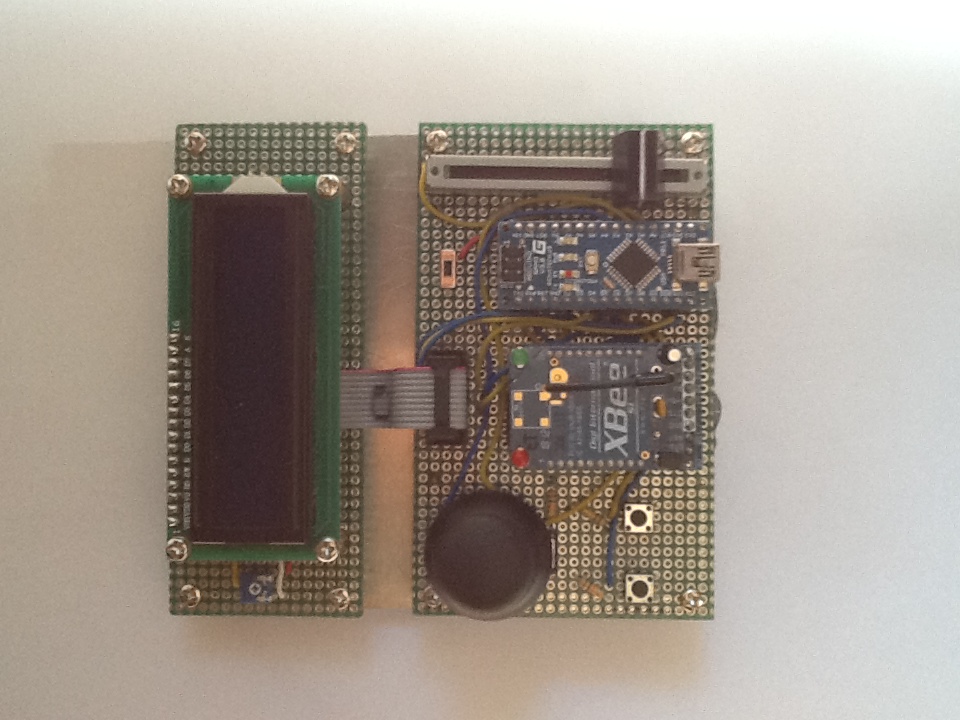
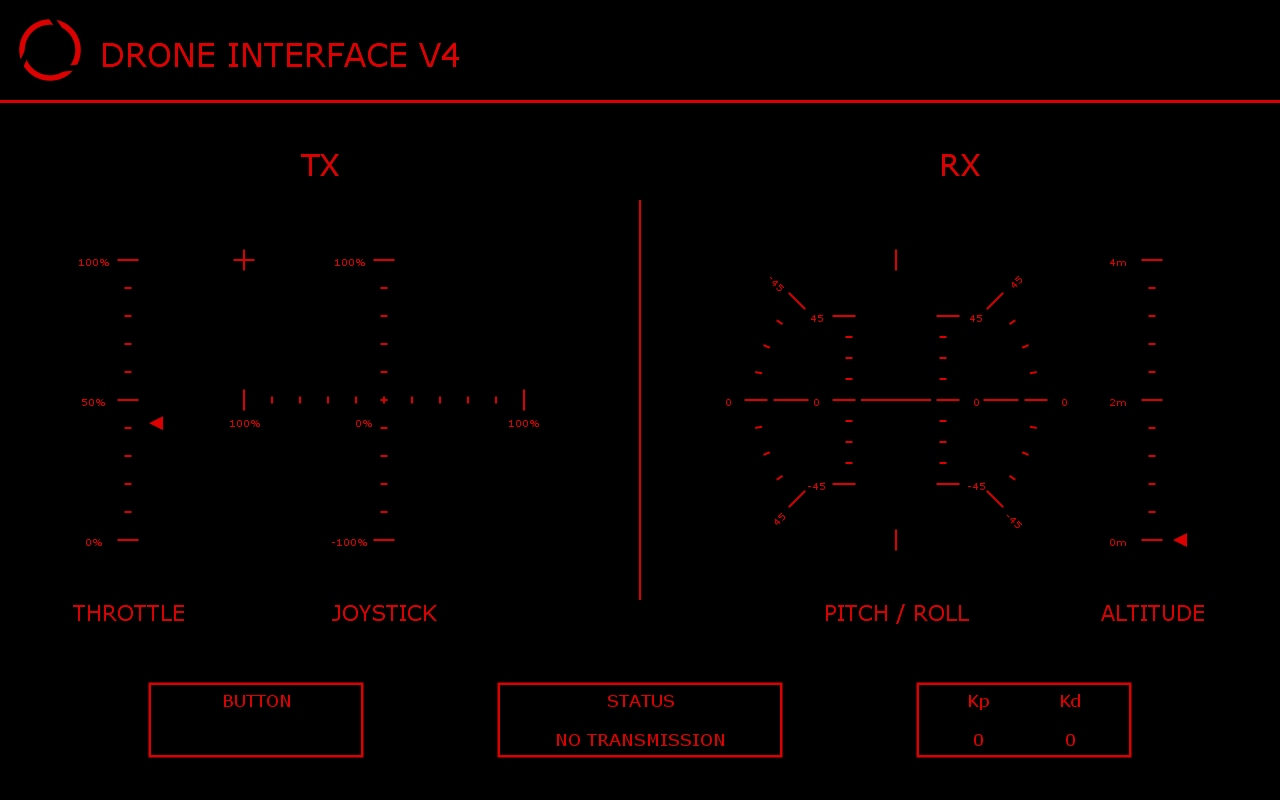
This first version of the drone was built around a homemade chassis, made from carbon fiber plates and beams. Its electronics consisted of an Arduino nano, an MPU6050 IMU and NRF24L01 for wireless control.

V2: Off the shelf electronics
For the second version of the drone, I decided to revise my ambition and use off the shelf electronics. I settled for a KK2.0 board from Hobbyking as main flight controller replaced my DIY remote controller with a commercial one designed for hobby projects. On the other hand, the drone chassis remained similar to that of version one, with the carbon fiber beams replaced with aluminium ones for extra robustness.

